Note
Click here to download the full example code
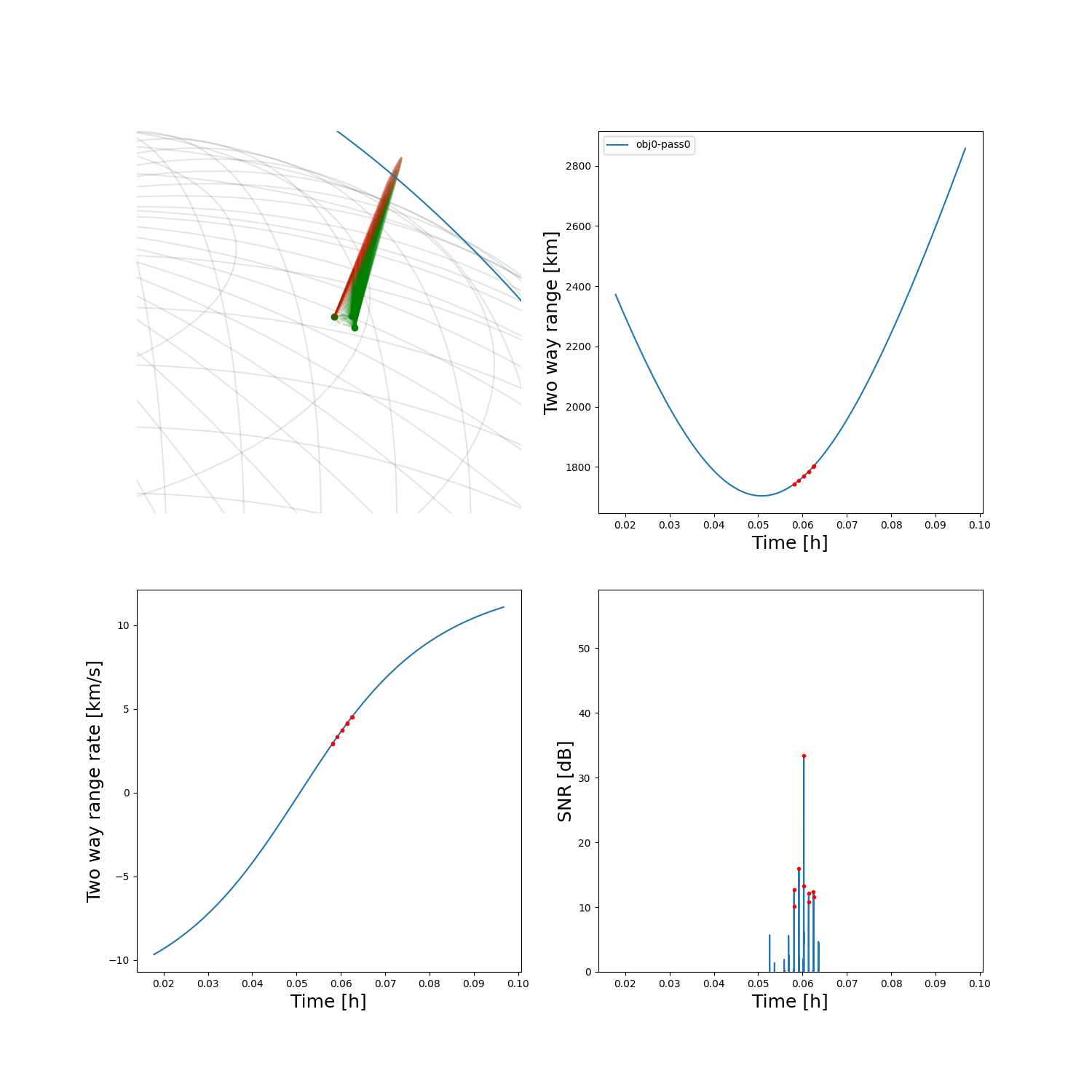
Simulate scanning for objects¶
Out:
Space object 1: <Time object: scale='utc' format='mjd' value=53005.0>:
a : 7.2000e+06 x : -1.3922e+06
e : 2.0000e-02 y : 3.4519e+06
i : 7.5000e+01 z : 6.0816e+06
omega: 0.0000e+00 vx: -1.3986e+03
Omega: 8.6000e+01 vy: -6.4897e+03
anom : 6.0000e+01 vz: 3.5175e+03
Parameters: C_D=2.3, m=1.0, C_R=1.0, d=0.1
2020-10-15 13:25:53.795 INFO ; Scanner:init
Temporal points obj 0: 4555
--------------------------------------- Performance analysis --------------------------------------
Name | Executions | Mean time | Total time
--------------------------------------------------------+--------------+---------------+--------------
equidistant_sampling | 1 | 6.91414e-05 s | 0.00 %
get_state | 1 | 5.40323e-02 s | 0.42 %
find_passes | 1 | 5.85890e-03 s | 0.05 %
Obs.Param.:calculate_observation:get_state | 3 | 5.40149e-02 s | 1.27 %
Obs.Param.:calculate_observation:enus,range,range_rate | 3 | 6.99520e-04 s | 0.02 %
Scanner:generator:point_radar:_point_station[tx] | 8361 | 1.10018e-04 s | 7.22 %
Scanner:generator:point_radar:_point_station[rx] | 25083 | 1.96978e-04 s | 38.76 %
Scanner:generator:point_radar | 8361 | 8.46843e-04 s | 55.54 %
Obs.Param.:calculate_observation:snr-step:gain | 8149 | 6.24864e-04 s | 39.95 %
Obs.Param.:calculate_observation:snr-step:snr | 8149 | 2.17805e-05 s | 1.39 %
Obs.Param.:calculate_observation:snr-step | 8361 | 6.45645e-04 s | 42.35 %
Obs.Param.:calculate_observation:generator | 3 | 4.17384e+00 s | 98.23 %
Obs.Param.:calculate_observation | 3 | 4.22882e+00 s | 99.52 %
observe_passes | 1 | 1.26873e+01 s | 99.53 %
total | 1 | 1.27473e+01 s | 100.00 %
---------------------------------------------------------------------------------------------------
/home/danielk/IRF/IRF_GITLAB/SORTS/examples/simulate_scanning.py:146: RuntimeWarning: divide by zero encountered in log10
SNRdB = 10*np.log10(dat['snr'])
import numpy as np
import matplotlib.pyplot as plt
import sorts
eiscat3d = sorts.radars.eiscat3d_interp
from sorts.scheduler import StaticList, ObservedParameters
from sorts.controller import Scanner
from sorts import SpaceObject
from sorts.profiling import Profiler
from sorts.radar.scans import Fence
from sorts.propagator import SGP4
Prop_cls = SGP4
Prop_opts = dict(
settings = dict(
out_frame='ITRF',
),
)
end_t = 600.0
scan = Fence(azimuth=90, num=40, dwell=0.1, min_elevation=30)
p = Profiler()
logger = sorts.profiling.get_logger('scanning')
objs = [
SpaceObject(
Prop_cls,
propagator_options = Prop_opts,
a = 7200e3,
e = 0.02,
i = 75,
raan = 86,
aop = 0,
mu0 = 60,
epoch = 53005.0,
parameters = dict(
d = 0.1,
),
),
]
for obj in objs: print(obj)
class ObservedScanning(StaticList, ObservedParameters):
pass
scanner_ctrl = Scanner(eiscat3d, scan, profiler=p, logger=logger)
scanner_ctrl.t = np.arange(0, end_t, scan.dwell())
p.start('total')
scheduler = ObservedScanning(
radar = eiscat3d,
controllers = [scanner_ctrl],
logger = logger,
profiler = p,
)
datas = []
passes = []
states = []
for ind in range(len(objs)):
p.start('equidistant_sampling')
t = sorts.equidistant_sampling(
orbit = objs[ind].state,
start_t = 0,
end_t = end_t,
max_dpos=1e3,
)
p.stop('equidistant_sampling')
print(f'Temporal points obj {ind}: {len(t)}')
p.start('get_state')
states += [objs[ind].get_state(t)]
p.stop('get_state')
p.start('find_passes')
#rename cache_data to something more descriptive
passes += [eiscat3d.find_passes(t, states[ind], cache_data = True)]
p.stop('find_passes')
p.start('observe_passes')
data = scheduler.observe_passes(passes[ind], space_object = objs[ind], snr_limit=False)
p.stop('observe_passes')
datas.append(data)
p.stop('total')
print(p.fmt(normalize='total'))
fig = plt.figure(figsize=(15,15))
axes = [
[
fig.add_subplot(221, projection='3d'),
fig.add_subplot(222),
],
[
fig.add_subplot(223),
fig.add_subplot(224),
],
]
sorts.plotting.grid_earth(axes[0][0])
for tx in eiscat3d.tx:
axes[0][0].plot([tx.ecef[0]],[tx.ecef[1]],[tx.ecef[2]],'or')
for rx in eiscat3d.rx:
axes[0][0].plot([rx.ecef[0]],[rx.ecef[1]],[rx.ecef[2]],'og')
for radar, meta in scanner_ctrl(np.arange(0,scan.cycle(),scan.dwell())):
for tx in radar.tx:
point_tx = tx.pointing_ecef/np.linalg.norm(tx.pointing_ecef, axis=0)*scanner_ctrl.r.max() + tx.ecef
axes[0][0].plot([tx.ecef[0], point_tx[0]], [tx.ecef[1], point_tx[1]], [tx.ecef[2], point_tx[2]], 'r-', alpha=0.15)
for rx in radar.rx:
pecef = rx.pointing_ecef/np.linalg.norm(rx.pointing_ecef, axis=0)
for ri in range(pecef.shape[1]):
point_tx = tx.pointing_ecef/np.linalg.norm(tx.pointing_ecef, axis=0)*scanner_ctrl.r[ri] + tx.ecef
point = pecef[:,ri]*np.linalg.norm(rx.ecef - point_tx) + rx.ecef
axes[0][0].plot([rx.ecef[0], point[0]], [rx.ecef[1], point[1]], [rx.ecef[2], point[2]], 'g-', alpha=0.05)
for ind in range(len(objs)):
for pi in range(len(passes[ind][0][0])):
ps = passes[ind][0][0][pi]
dat = datas[ind][0][0][pi]
axes[0][0].plot(states[ind][0,ps.inds], states[ind][1,ps.inds], states[ind][2,ps.inds], '-')
if dat is not None:
SNRdB = 10*np.log10(dat['snr'])
det_inds = SNRdB > 10.0
axes[0][1].plot(dat['t']/3600.0, dat['range']*1e-3, '-', label=f'obj{ind}-pass{pi}')
axes[1][0].plot(dat['t']/3600.0, dat['range_rate']*1e-3, '-')
axes[1][1].plot(dat['t']/3600.0, SNRdB, '-')
axes[0][1].plot(dat['t'][det_inds]/3600.0, dat['range'][det_inds]*1e-3, '.r')
axes[1][0].plot(dat['t'][det_inds]/3600.0, dat['range_rate'][det_inds]*1e-3, '.r')
axes[1][1].plot(dat['t'][det_inds]/3600.0, SNRdB[det_inds], '.r')
axes[1][1].set_ylim([0, None])
font_ = 18
axes[0][1].set_xlabel('Time [h]', fontsize=font_)
axes[1][0].set_xlabel('Time [h]', fontsize=font_)
axes[1][1].set_xlabel('Time [h]', fontsize=font_)
axes[0][1].set_ylabel('Two way range [km]', fontsize=font_)
axes[1][0].set_ylabel('Two way range rate [km/s]', fontsize=font_)
axes[1][1].set_ylabel('SNR [dB]', fontsize=font_)
axes[0][1].legend()
dr = 600e3
axes[0][0].set_xlim([eiscat3d.tx[0].ecef[0]-dr, eiscat3d.tx[0].ecef[0]+dr])
axes[0][0].set_ylim([eiscat3d.tx[0].ecef[1]-dr, eiscat3d.tx[0].ecef[1]+dr])
axes[0][0].set_zlim([eiscat3d.tx[0].ecef[2]-dr, eiscat3d.tx[0].ecef[2]+dr])
plt.show()
Total running time of the script: ( 0 minutes 14.315 seconds)