Note
Click here to download the full example code
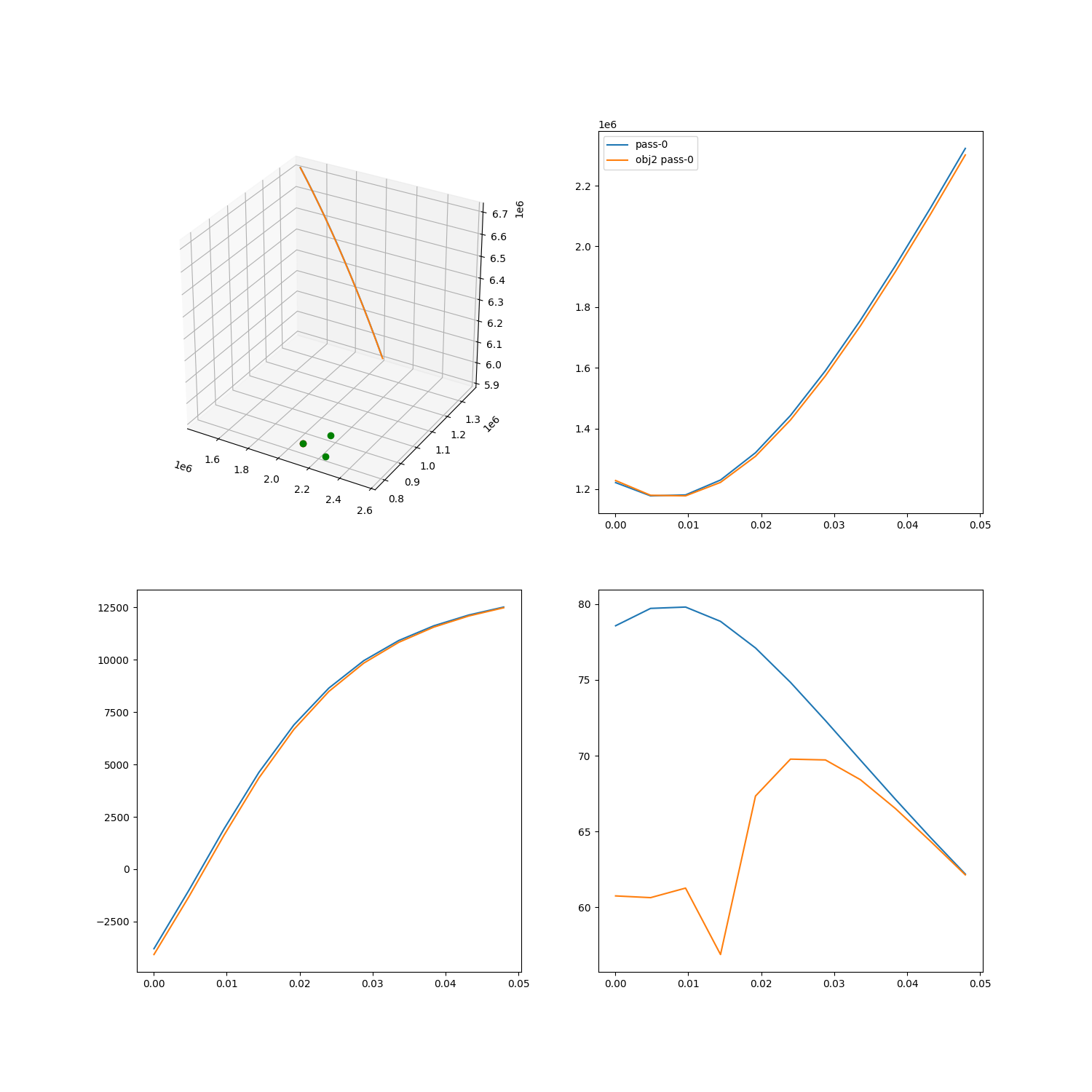
Observing a set of passes¶
Out:
Space object 1: <Time object: scale='utc' format='mjd' value=53005.0>:
a : 7.2000e+06 x : -1.2858e+06
e : 1.0000e-01 y : 2.3487e+06
i : 7.5000e+01 z : 6.3831e+06
omega: 0.0000e+00 vx: -2.1177e+03
Omega: 7.9000e+01 vy: -6.8611e+03
anom : 6.2000e+01 vz: 2.8722e+03
Parameters: C_D=2.3, m=1.0, C_R=1.0, d=1.0
Space object 1: <Time object: scale='utc' format='mjd' value=53005.0>:
a : 7.2000e+06 x : -1.2822e+06
e : 1.0000e-01 y : 2.3603e+06
i : 7.5000e+01 z : 6.3782e+06
omega: 0.0000e+00 vx: -2.1203e+03
Omega: 7.9000e+01 vy: -6.8563e+03
anom : 6.1900e+01 vz: 2.8852e+03
Parameters: C_D=2.3, m=1.0, C_R=1.0, d=1.0
Temporal points: 177678
/home/danielk/IRF/IRF_GITLAB/pyant/pyant/coordinates.py:89: RuntimeWarning: invalid value encountered in greater
proj[proj > 1.0] = 1.0
/home/danielk/IRF/IRF_GITLAB/pyant/pyant/coordinates.py:90: RuntimeWarning: invalid value encountered in less
proj[proj < -1.0] = -1.0
/home/danielk/IRF/IRF_GITLAB/SORTS/sorts/passes.py:341: RuntimeWarning: invalid value encountered in less
check_st = zenith_st_ang < 90.0-station.min_elevation
t [s] rx0 az rx0 el rx1 az rx1 el rx2 az rx2 el Controller Target
---------- -------- -------- -------- -------- -------- -------- ------------ -------------
0.121569 197.459 65.9292 234.018 68.8548 207.813 79.3268 Tracker Cool object 1
17.3843 176.736 75.5346 246.31 80.3619 93.1725 86.6929 Tracker Cool object 1
34.6471 121.568 79.5048 -3.0253 85.1947 52.1712 75.8492 Tracker Cool object 1
51.9099 78.9973 73.1485 31.588 74.8055 47.599 65.3952 Tracker Cool object 1
69.1727 64.3553 64.2488 37.3099 64.7108 45.9324 56.4559 Tracker Cool object 1
86.4354 57.9827 55.9974 39.6176 56.0348 45.0938 49.0171 Tracker Cool object 1
103.698 54.5242 48.9105 40.8829 48.7827 44.6042 42.8685 Tracker Cool object 1
120.961 52.3813 42.9503 41.6958 42.7618 44.2945 37.7639 Tracker Cool object 1
138.224 50.9369 37.9469 42.2721 37.7423 44.0895 33.4827 Tracker Cool object 1
155.487 49.9059 33.7186 42.7092 33.5171 43.951 29.8467 Tracker Cool object 1
172.749 49.1393 30.1081 43.0576 29.9175 43.8572 26.7175 Tracker Cool object 1
--------------------------------------- Performance analysis --------------------------------------
Name | Executions | Mean time | Total time
--------------------------------------------------------+--------------+---------------+--------------
Obs.Param.:calculate_observation:get_state | 3 | 1.96428e-02 s | 26.28 %
Obs.Param.:calculate_observation:enus,range,range_rate | 3 | 4.16517e-04 s | 0.56 %
Obs.Param.:calculate_observation:snr-step:gain | 30 | 4.88706e-03 s | 65.38 %
Obs.Param.:calculate_observation:snr-step:snr | 30 | 2.59320e-05 s | 0.35 %
Obs.Param.:calculate_observation:snr-step | 30 | 4.93180e-03 s | 65.98 %
Obs.Param.:calculate_observation:generator | 3 | 5.45375e-02 s | 72.96 %
Obs.Param.:calculate_observation | 3 | 7.46603e-02 s | 99.89 %
total | 1 | 2.24236e-01 s | 100.00 %
---------------------------------------------------------------------------------------------------
import pathlib
from tabulate import tabulate
import numpy as np
import matplotlib.pyplot as plt
import sorts
eiscat3d = sorts.radars.eiscat3d
from sorts.controller import Tracker
from sorts.scheduler import StaticList, ObservedParameters
from sorts import SpaceObject
from sorts.profiling import Profiler
from sorts.propagator import SGP4
Prop_cls = SGP4
Prop_opts = dict(
settings = dict(
out_frame='ITRF',
),
)
prop = Prop_cls(**Prop_opts)
objs = [
SpaceObject(
Prop_cls,
propagator_options = Prop_opts,
a = 7200e3,
e = 0.1,
i = 75,
raan = 79,
aop = 0,
mu0 = mu0,
epoch = 53005.0,
parameters = dict(
d = 1.0,
),
)
for mu0 in [62.0, 61.9]
]
for obj in objs: print(obj)
t = sorts.equidistant_sampling(
orbit = objs[0].state,
start_t = 0,
end_t = 3600*6,
max_dpos=1e3,
)
print(f'Temporal points: {len(t)}')
states0 = objs[0].get_state(t)
states1 = objs[1].get_state(t)
#set cache_data = True to save the data in local coordinates
#for each pass inside the Pass instance, setting to false saves RAM
passes0 = eiscat3d.find_passes(t, states0, cache_data = False)
passes1 = eiscat3d.find_passes(t, states1, cache_data = False)
#just create a controller for observing 10 points of the first pass
ps = passes0[0][0][0]
use_inds = np.arange(0,len(ps.inds),len(ps.inds)//10)
e3d_tracker = Tracker(radar = eiscat3d, t=t[ps.inds[use_inds]], ecefs=states0[:3,ps.inds[use_inds]])
e3d_tracker.meta['target'] = 'Cool object 1'
class MyStaticList(StaticList, ObservedParameters):
def __init__(self, radar, controllers, profiler=None, logger=None):
super().__init__(
radar=radar,
controllers=controllers,
profiler=profiler,
logger=logger,
)
def generate_schedule(self, t, generator):
data = np.empty((len(t),len(self.radar.rx)*2+1), dtype=np.float64)
data[:,0] = t
names = []
targets = []
for ind,mrad in enumerate(generator):
radar, meta = mrad
names.append(meta['controller_type'].__name__)
targets.append(meta['target'])
for ri, rx in enumerate(radar.rx):
data[ind,1+ri*2] = rx.beam.azimuth
data[ind,2+ri*2] = rx.beam.elevation
data = data.T.tolist() + [names, targets]
data = list(map(list, zip(*data)))
return data
p = Profiler()
scheduler = MyStaticList(radar = eiscat3d, controllers=[e3d_tracker], profiler=p)
sched_data = scheduler.schedule()
rx_head = [f'rx{i} {co}' for i in range(len(scheduler.radar.rx)) for co in ['az', 'el']]
sched_tab = tabulate(sched_data, headers=["t [s]"] + rx_head + ['Controller', 'Target'])
print(sched_tab)
p.start('total')
data0 = scheduler.observe_passes(passes0, space_object = objs[0], snr_limit=False)
p.stop('total')
print(p.fmt(normalize='total'))
data1 = scheduler.observe_passes(passes1, space_object = objs[1], snr_limit=False)
#create a tdm file example
# pth = pathlib.Path(__file__).parent / 'data' / 'test_tdm.tdm'
# print(f'Writing TDM data to: {pth}')
# dat = data0[0][0][0]
# sorts.io.write_tdm(
# pth,
# dat['t'],
# dat['range'],
# dat['range_rate'],
# np.ones(dat['range'].shape),
# np.ones(dat['range_rate'].shape),
# freq=eiscat3d.tx[0].beam.frequency,
# tx_ecef=eiscat3d.tx[0].ecef,
# rx_ecef=eiscat3d.rx[0].ecef,
# tx_name="EISCAT 3D Skiboten",
# rx_name="EISCAT 3D Skiboten",
# oid="Some cool space object",
# tdm_type="track",
# )
fig = plt.figure(figsize=(15,15))
axes = [
[
fig.add_subplot(221, projection='3d'),
fig.add_subplot(222),
],
[
fig.add_subplot(223),
fig.add_subplot(224),
],
]
for tx in scheduler.radar.tx:
axes[0][0].plot([tx.ecef[0]],[tx.ecef[1]],[tx.ecef[2]], 'or')
for rx in scheduler.radar.rx:
axes[0][0].plot([rx.ecef[0]],[rx.ecef[1]],[rx.ecef[2]], 'og')
for pi in range(len(passes0[0][0])):
dat = data0[0][0][pi]
dat2 = data1[0][0][pi]
if dat is not None:
axes[0][0].plot(states0[0,passes0[0][0][pi].inds], states0[1,passes0[0][0][pi].inds], states0[2,passes0[0][0][pi].inds], '-', label=f'pass-{pi}')
axes[0][1].plot(dat['t']/3600.0, dat['range'], '-', label=f'pass-{pi}')
axes[1][0].plot(dat['t']/3600.0, dat['range_rate'], '-', label=f'pass-{pi}')
axes[1][1].plot(dat['t']/3600.0, 10*np.log10(dat['snr']), '-', label=f'pass-{pi}')
if dat2 is not None:
axes[0][0].plot(states1[0,passes1[0][0][pi].inds], states1[1,passes1[0][0][pi].inds], states1[2,passes1[0][0][pi].inds], '-', label=f'obj2 pass-{pi}')
axes[0][1].plot(dat2['t']/3600.0, dat2['range'], '-', label=f'obj2 pass-{pi}')
axes[1][0].plot(dat2['t']/3600.0, dat2['range_rate'], '-', label=f'obj2 pass-{pi}')
axes[1][1].plot(dat2['t']/3600.0, 10*np.log10(dat2['snr']), '-', label=f'obj2 pass-{pi}')
axes[0][1].legend()
plt.show()
Total running time of the script: ( 0 minutes 4.106 seconds)